With the rapid development of modern high-tech, digitalization, informatization and intelligence are increasingly applied to all aspects of human society's production and life. Intelligent driverless cars that can only be seen in popular science novels are no longer It is illusory, and people will be able to see smart driverless cars in reality in the near future. Nowadays, the car, which combines all kinds of high-tech, has made great progress in its performance, comfort and safety. Intelligent driverless cars usually have a highly intelligent computer that can receive various information from the surrounding environment and various information of the car itself, and can efficiently and quickly organize and then transmit the information to the execution system of the car. In order to achieve automatic driving, intelligent control and other functions.
The technical principle of the vehicle to achieve automatic driving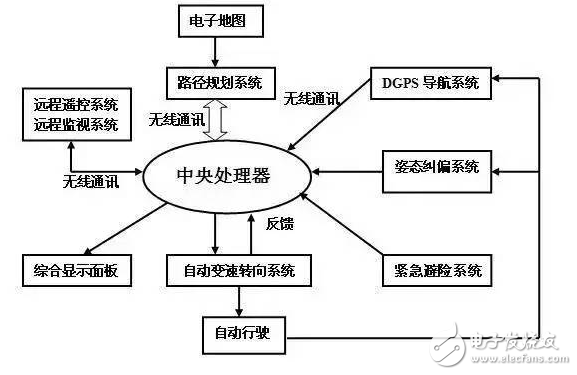
When the driver is driving the car, the destination is set on the electronic map of the car display screen, and the driving route is designed, and the electronic map confirmation is automatically imported into the central processor, and the central processor plans a reasonable driving path according to the boundary of the block. .

In the system, the angle sensor, the motor speed sensor, the position sensor, the pressure sensor and the like are used to measure the driving information, and the driving information is converted into an electric signal and transmitted to the central processing unit for calculation, and then the central processor issues an instruction to control the automatic shifting steering mechanism. , constitute a closed-loop system to achieve intelligent control of car driving.
Artificial intelligence technology in driverless driving (Drive.Ai)1. Environmental awareness, this is the research focus in the field of computer vision . It is often said that slam refers to this. The laser-based slam system has been able to perform better map positioning and local environmental map construction.
2, identification , including lane recognition traffic sign recognition (such as traffic lights) vehicle pedestrian recognition and motion tracking, here, CNN (ConvoluTIonal NeuralNetwork, convolutional neural network) technology has become the best technology at present, logo recognition is unmanned behavior Basis of decision making
Cnn technology is also a good complement to lidar because it is low pixel and does not identify obstacles well.
3. Behavioral decision system technology
Behavioral decision-making systems, or driving decision-making systems, including global route planning navigation and local obstacle avoidance and avoidance, as well as conventional traffic rule-based driving strategies (the simplest, keeping the car in the lane), the use of technology Three types
1) Technology based on inference logic and rules
A*, D* algorithm for global path planning navigation, dwa algorithm for local obstacle avoidance, conventional optimal control mathematical methods (such as multi-objective decision making), and fsm rule engine based on traffic rules belong to this type of technology.
2), fast optimization of genetic algorithm
When there are multiple strategies to choose from, how to choose the best target or strategy, the mathematical method based on linear programming or dynamic programming has a slow calculation speed. In many cases, it can't be modeled or the calculation is too large to calculate. This is the genetic algorithm. Place to work

3), neural network technology
The use of neural networks for autonomous driving training is the latest research hotspot, and it is often said that letting neural networks learn to drive like humans is an exciting goal.
However, the problem with neural networks is that it is opaque, a black box system, and is unexplained. Basically, you can't say why the value of a node in the training model is 0.1 instead of 0.5, which is determined by the characteristics of the neural network. In addition, it is also questionable whether a good model trained with training data can play a similar role in a new environment.
One of the easiest ways to design an unmanned system is to use neural networks to do all the control. We only need to train it with a lot of data, so we don't have to write complicated control strategy algorithm code. We just need to train. Good neural network, then let it run with very little code, but before the interpretability of neural network can't be solved, the completely automatic neural network-based autopilot system is obviously not convincing and comfortable.
Therefore, the control strategy based on inference logic in the driverless system is still very important. It is the most feasible direction for the white box control system based on inference logic and the black box control system based on neural network to work together.
4. Vehicle control system technology
In addition to the traditional pid control, vehicle control system technology has increasingly introduced neural network fuzzy control in unmanned vehicle systems.
Common driving decision control strategies for driverless (autopilot) systems1. Global navigation path planning a*, image recognition neural network and control strategy combining instant driving and obstacle avoidance dwa
This is the traditional driverless control strategy. The global path navigation uses the conventional a* algorithm (others can also be used). The image of the vehicle camera is processed by the neural network to extract the lane traffic sign and the vehicle pedestrian information, and then use this information. As an input, use the vfh/dwa algorithm for instant driving and obstacle avoidance control, such as lane change brakes, etc.

This control strategy is used by the Google Unmanned Vehicle Autopilot system.
2. Highly intelligent control strategy combining global path planning with instant driving and obstacle avoidance neural networks
The global plan still uses the same algorithm as the strategy, but in the instant driving and obstacle avoidance, the neural network technology is completely used, and the original pixel map feature captured from the camera is used as the input end of the neural network, and the output end is the car. Manipulate commands. We no longer extract lane information, traffic signs, and vehicle pedestrian signs from the original pixel map. All of this is given to the neural network for automatic identification. The final output is the vehicle control commands such as steering tracking deceleration brakes. The neural network uses hundreds of millions of dollars. Node.

Proximity Switch For Automobile,Proximity Switch For Industrial Control,Sensing Probe For Industry And Horticulture,Temperature Sensing Probe
Foshan City Jiulong Machine Co., Ltd , https://www.jlthermostat.com