科å¦çš„å‘展使得汽车æ£å¢žåŠ ç€è¶Šæ¥è¶Šå¤šçš„功能,如何使这些众多的独立功能å调统一工作,亦å³å¦‚何对整个车身进行控制,已ç»æˆä¸ºæ•´ä¸ªæ±½è½¦ç”µåç ”ç©¶é¢†åŸŸä¸éžå¸¸é‡è¦çš„课题。汽车网络,å³æ±½è½¦æ€»çº¿æŠ€æœ¯åœ¨è¿™ç§çŽ¯å¢ƒä¸‹åº”è¿è€Œç”Ÿäº†ã€‚而CAN 总线技术以其高实时性ã€é«˜å¯é 性在å„ç§æ±½è½¦æŽ§åˆ¶æ€»çº¿ä¸ç‹¬å 鳌头。
本文引用地å€: http://
   1 CAN 总线技术简介
   CAN,全称为“Controller Area Networkâ€ï¼Œå³æŽ§åˆ¶å™¨å±€åŸŸç½‘,是国际上应用最广泛的现场总线之一。CAN 最åˆå‡ºçŽ°åœ¨80 年代末的汽车工业ä¸ï¼Œç”±å¾·å›½Bosch å…¬å¸æœ€å…ˆæ出。CAN 是一ç§å¤šä¸»æ–¹å¼çš„串行通讯总线,基本设计规范è¦æ±‚有高的ä½é€ŸçŽ‡ï¼Œé«˜æŠ—电ç£å¹²æ‰°æ€§ï¼Œè€Œä¸”能够检测出产生的任何错误。当信å·ä¼ 输è·ç¦»è¾¾åˆ°10km 时,CAN ä»å¯æ供高达50Kbit/s çš„æ•°æ®ä¼ 输速率。目å‰CAN 总线已ç»å½¢æˆå›½é™…æ ‡å‡†ï¼Œå¹¿æ³›åº”ç”¨äºŽæ¬§ç¾Žè½¿è½¦ï¼Œè¢«å…¬è®¤ä¸ºå‡ ç§æœ€æœ‰å‰é€”的现场总线之一。
   2 系统设计æ€æƒ³
   汽车车身系统的控制对象包括: 4 个车门é”ã€2 个以上车窗玻璃å‡é™å™¨ã€è¡ŒæŽç®±é”ã€é™¤éœœåŠ çƒå™¨ã€ç”µåŠ¨åŽè§†é•œã€å‰åŽå¤§ç¯ã€å°ç¯ã€è½¬å‘ç¯ã€å±é™©ç¯ã€é›¾ç¯ã€ç‰Œç…§ç¯ã€è½¦å†…阅读ç¯ã€è½¦åŽ¢é¡¶ç¯ç‰ã€‚在具备é¥æŽ§åŠŸèƒ½çš„情况下,还包括对é¥æŽ§ä¿¡å·çš„接收处ç†å’Œé˜²ç›—ç³»ç»Ÿçš„æŽ§åˆ¶ã€‚å› æ¤ï¼Œæ ¹æ®ä»¥ä¸Šè¦å®Œæˆçš„å„功能,将本系统设计为 5 个å模å—,分别是ä¸å¤®æŽ§åˆ¶æ¨¡å—( 实现ä¸æŽ§é—¨é”ã€é˜²ç›—ã€é›¨åˆ®ã€å†…外ç¯å’ŒåŽçª—åŠåŽè§†é•œåŠ çƒç‰åŠŸèƒ½ï¼‰ ,4 个门控模å—( 分别为主驾门模å—ã€å³å‰é—¨æ¨¡å—ã€å·¦åŽé—¨æ¨¡å—ã€å³åŽé—¨æ¨¡å—,æ¥æŽ§åˆ¶è½¦çª—å‡é™å™¨å’Œé—¨é”)。
   图1 给出了车身控制模å—CAN 总线结构。
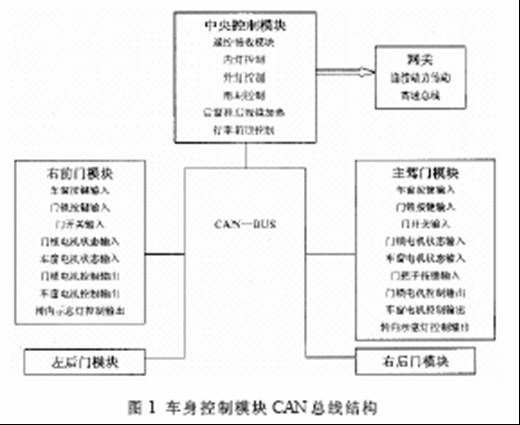
   3.1 系统å„模å—电路框图
Â Â Â æ ¹æ®ä»¥ä¸Šè®¾è®¡æ€æƒ³åˆ†ä¸º5个å模å—。
主控å•å…ƒæŽ¥æ”¶å¼€å…³ä¿¡å·ä¹‹åŽï¼Œå…ˆè¿›è¡Œåˆ†æžå¤„ç†ï¼Œç„¶åŽé€šè¿‡CAN总线把控制指令å‘é€ç»™å„å—控端,å„å—控端å“应åŽä½œå‡ºç›¸åº”的动作。
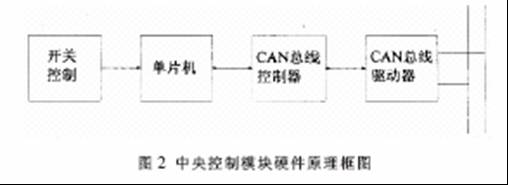
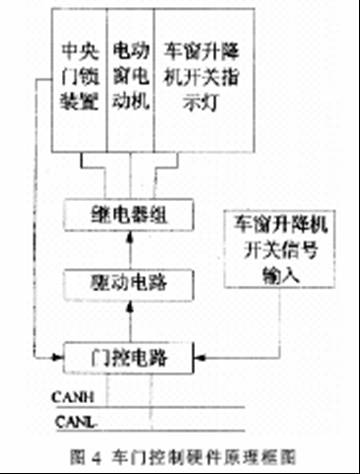
   以下是å„模å—的电路框图è§å›¾2ã€å›¾3ã€å›¾4。
    3.2 系统主è¦ä½¿ç”¨çš„元器件
   (1)CAN控制器。考虑到系统拓展的需è¦ï¼Œæˆ‘们采用PHILIPSå…¬å¸ç”Ÿäº§çš„SJA 1000æ¥ä½œä¸ºæ¤ç³»ç»Ÿçš„CAN控制器。它既和PCA82C200独立CAN控制器引脚兼容,åˆå’ŒPCA82C200独立CAN控制器电气兼容;既支æŒBasicCAN模å¼ï¼Œåˆæ”¯æŒPeliCAN模å¼ï¼›å’ŒCAN2.0Bå议兼容;å¯åŒæ—¶æ”¯æŒ11ä½å’Œ29ä½è¯†åˆ«ç ï¼›ä½é€ŸçŽ‡å¯è¾¾1Mbits/s。
   (2)CAN收å‘器。采用PHILIPSå…¬å¸ç”Ÿäº§TJA1050,跟PCA82C250ä¸€æ ·ï¼ŒTJA 1050符åˆISO 11898æ ‡å‡†ï¼Œä½†åœ¨å…³é”®çš„AM波段上它的è¾å°„比PCA82C250低20dB以上。在ä¸ä¸Šç”µæ—¶æ€»çº¿å‘ˆçŽ°æ— æºç‰¹æ€§ã€‚
   (3)å•ç‰‡æœºã€‚采用P89C51。该å•ç‰‡æœºæ˜¯80C51微控制器的派生器件,是采用先进CMOSå·¥è‰ºåˆ¶é€ çš„8ä½å¾®æŽ§åˆ¶å™¨ï¼ŒæŒ‡ä»¤ç³»ç»Ÿä¸Ž80C51完全相åŒã€‚
 4 ã€åŸºäºŽCAN总线车身控制系统的软件开å‘
   在CAN 总线构æˆçš„系统ä¸ï¼Œç”¨æˆ·è¦æ ¹æ®è‡ªå·±çš„è¦æ±‚æ¥ç¼–写应用层和用户层软件。用户层实现用户è¦æ±‚的控制ç–略和系统,而应用层则是在用户层与接å£ä¹‹é—´ï¼ŒCAN建立了报文å‘é€æ—¶çš„方法ã€ä¿¡å·ç”µå¹³åŠå议,应用层则定义了结构ã€å“应åŠæŠ¥æ–‡çš„æ„义,应用层è¦æ ¹æ®CAN系统应用场åˆçš„ä¸åŒè€Œæœ‰æ‰€å˜åŒ–。
   4.1 CAN控制器的åˆå§‹åŒ–
   CAN控制器SJA1000在æ£å¼æ”¶å‘ä¿¡å·ä¹‹å‰å¿…须进行åˆå§‹åŒ–设置。对SJA 1000çš„åˆå§‹åŒ–是对工作方å¼ã€æŽ¥æ”¶æ»¤æ³¢å¯„å˜å™¨ã€æŽ¥æ”¶å±è”½å¯„å˜å™¨ã€æŽ¥æ”¶ä»£ç 寄å˜å™¨ã€æ³¢ç‰¹çŽ‡å‚æ•°ç‰çš„设置,è¦æ±‚对写入æ¯ä¸ªå¯„å˜å™¨çš„内容进行仔细和全é¢çš„考虑。
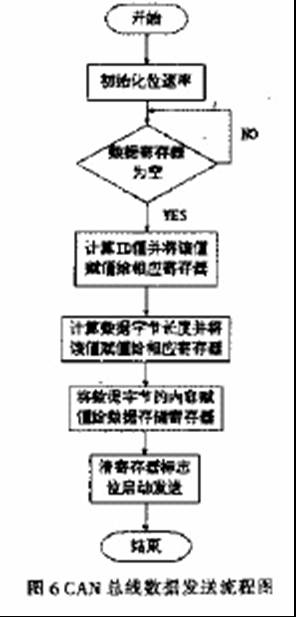
   4.2 CAN总线上数æ®çš„å‘é€å’ŒæŽ¥æ”¶
   对SJA 1000åˆå§‹åŒ–æˆåŠŸåŽï¼Œå°±å¯ä»¥ç”¨å®ƒæ¥ä¼ 输和接收报文。节点å‘总线å‘é€æŠ¥æ–‡çš„过程是:å•ç‰‡æœºP89C51将待å‘é€çš„æ•°æ®æŒ‰CANæ ¼å¼ç»„æˆä¸€å¸§æŠ¥æ–‡ï¼Œå†™å…¥SJA1000çš„å‘é€ç¼“冲区,然åŽå¯åŠ¨SJA1000,把报文å‘é€åˆ°æ€»çº¿ä¸ŠåŽ»ã€‚接收报文的过程是:SJA 1000从总线上自动接收报文,并ç»è¿‡è¿‡æ»¤åŽå˜å…¥æŽ¥æ”¶ç¼“冲区,并å‘å•ç‰‡æœºå‘出ä¸æ–请求,å•ç‰‡æœºä»Žç¼“冲区读å–报文。å‘é€å’ŒæŽ¥æ”¶æµç¨‹è§å›¾6ã€å›¾7。   Â
    Â

   5 结æŸè¯
   CAN总线以其高性能ã€é«˜å¯é 性åŠå…¶ç‹¬ç‰¹çš„设计越æ¥è¶Šå—到人们的é‡è§†ï¼Œå¹¶è¢«å…¬è®¤ä¸ºæ˜¯æ±½è½¦ç”µæŽ§ç³»ç»Ÿä¸æœ€æœ‰å‰é€”的总线之一。它作为一ç§å¯é 的汽车计算机网络总线已在许多先进汽车上得到应用,使得å„汽车计算机控制å•å…ƒèƒ½å¤Ÿé€šè¿‡CAN总线共享所有信æ¯å’Œèµ„æºï¼Œè¾¾åˆ°ç®€åŒ–布线ã€å‡å°‘ä¼ æ„Ÿå™¨æ•°é‡ã€é¿å…控制功能é‡å¤ã€æ高系统å¯é 性和维护性ã€é™ä½Žæˆæœ¬ã€æ›´å¥½åœ°åŒ¹é…å’Œåè°ƒå„个控制系统的目的。
0-20Kva Diesel Generator,Portable Power Generator,Open Type Power Generator,Container Power Generator
Shanghai Kosta Electric Co., Ltd. , https://www.ksdgenerator.com